Robot is an intelligent machine that can physically execute an action or a series of actions automatically. Robots are typically goal-directed, meaning that they have been programmed to accomplish a particular goal. A robot can sense the external world and its position in it, determine what action needs to be taken to bring about a goal, and perform that action. This cycle of sensation, decision, and action is often referred to as sense-plan-act.
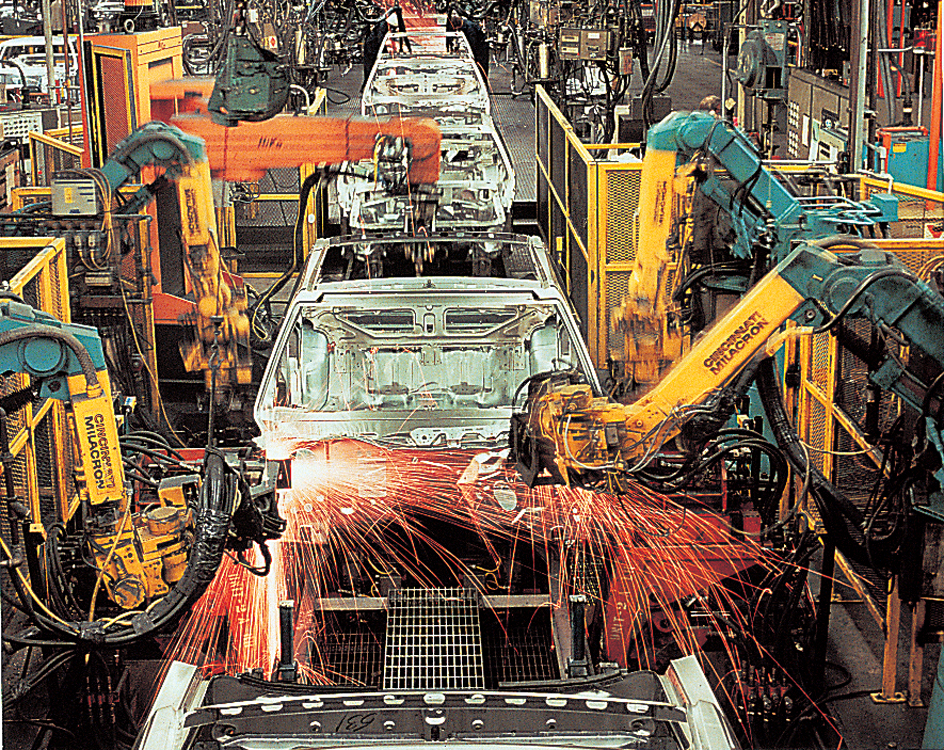
Robots are common in factories, where they perform repetitive tasks such as welding and drilling. Robots are also used in environments that are too dangerous or impossible for humans to reach. Scientists have used robots to explore the sea floor on Earth and the surface of Mars. Doctors use robots in medical diagnosis and surgery, and to assist with therapy and human mobility. Robots help pilots fly aircraft and help some cars avoid collisions and drive or park themselves.
Robots also can be found in many homes. Some households may have automated vacuum cleaners or robotic toys. In the future, people will have even more robots in homes doing many different types of tasks.
Robotics is the field of designing, building, programming, and studying robots. The field of robotics draws upon tools from mechanical engineering, electrical engineering, and computer science. An expert in the field of robotics is called a roboticist.

Robot design
Robots vary greatly in shape and size, depending on their functions. They can look like humans, animals, vehicles, or other machines. Robots can be made to roll, walk, fly, swim, or stay in place. A robot can be as small as a cell or as large as a truck. Despite vast differences in size and shape, all robots share certain features that allow them to sense and interact with their environments.
Sensors.
A robot requires sensors to obtain information about itself and its surroundings. A machine without sensors acts blindly and cannot be considered a robot.
All robots must sense the status of at least some of their parts. Obtaining this information is called proprioceptive sensing. For example, a robot might determine the angles of its arm joints or the positions of its wheels with sensors called encoders. A robot might monitor the status of its internal systems, such as its temperature or power level, so it can act to keep itself operational. A robot might also need to sense how it is interacting with external world. For example, it might determine how tightly it is gripping an object using force sensors.
All robots must also somehow measure their environment. Obtaining this information is called exteroceptive sensing. For example, a robot might need to locate and identify objects that it needs to interact with or avoid. This information is often gathered through cameras and sensors, such as laser rangefinders, infrared sensors, or sonar.
Actuators.
A robot requires one or more actuators to take action. The most common actuators are motors. An actuator moves a part of the robot’s body called an effector. An effector is a piece of a robot that interacts with the environment to perform an action. Wheels, propellers, arms, hands, and grippers are all effectors.
Power.
Robots require a power source for actuators and other components to function. Robots that remain in place may be connected directly to an electrical supply. Mobile robots typically use batteries. As battery technology has improved, mobile robots have been able to venture farther afield before needing to be recharged. Some robots, such as many space probes, use solar panels to recharge their batteries.
Computer control.
A robot is equipped with computer hardware that controls its actions. Developments in computer science have enabled engineers to create more powerful robots. These robots can process more information from sensors, allowing them to interact with their environments in more complex ways. Robots have computer programs, or software, that instruct them on what goals they are to achieve and how they should operate to achieve them. Almost all robots have software that can be reprogrammed to work to achieve different goals.
Basic robotics concepts
No matter how they are designed or what function they serve, the operation of any robot involves the basic concepts of autonomy, control, and uncertainty.
Autonomy
is the degree to which a robot is able to make decisions without input from a human operator to achieve a goal. Autonomy allows the robot to adapt to changing conditions. Robots must sense the external world in order to exhibit autonomy. An autonomous robot makes higher-level decisions on its own—for example, not only choosing motor positions in order to move its leg, but also deciding on which path to take to reach a certain destination.
All robots must have some level of autonomy. Some machines commonly called robots, such as bomb disposal units, are fully controlled by human operators and have little to no autonomy. A factory robot may have a limited level of autonomy in order to deal with issues commonly experienced on the assembly line. But such robots usually require human intervention when an unexpected event occurs. Some robots, such as the Mars rover Curiosity, receive commands from humans, but possess autonomy to determine how to carry out those commands based on local conditions. This arrangement is an example of a shared-control robot. In fact, all robots today have some input from a human operator—even if just in picking the robot’s task. Thus, there are not yet any fully autonomous robots.
The level of autonomy in a robot is related to how much its environment has been adapted to it. In a structured environment, such as a factory assembly line, the robot’s workspace has been carefully configured to promote repeatability and to reduce unexpected events. Such robots require less autonomy. In an unstructured environment, however, a robot must have more autonomy to react to unexpected events.
Control.
Robots make a variety of decisions as they work to accomplish their tasks. These decisions can be simple, such as how long to run a motor, or very complex, such as identifying and picking up an object. Control theory is the concept of using sensors and algorithms (mathematical processes) to enable a robot to make decisions on how to perform tasks.
Control typically happens at multiple levels, depending on the complexity of the task that the robot is trying to perform. At the lowest level, control systems move actuators in order to drive effectors. Planning is a higher level of control. Based on sensor data, control systems develop a sequence of actuator movements to accomplish a task. At an even higher level of control, the robot may even be responsible for determining its task. The highest levels of control use tools from the field of artificial intelligence.
Uncertainty.
Improving robot control in the face of uncertainty is crucial to broadening the usefulness of robots. Sensors can give a robot inaccurate or unclear information about itself or its environment. Similarly, actuators do not always execute movements precisely. Both sensors and actuators are prone to deteriorate over time. These factors result in uncertainty about the robot’s environment, its location and position in its environment, and how it has interacted with that environment. If too many errors accumulate, a robot may veer off course, damage objects, or otherwise be unable to complete its tasks.
Roboticists are working to create control structures that will allow robots to cope with uncertainty and remain functional. Robots may have redundant sensors and actuators. If one begins to fail, control algorithms may be able to discover it and deactivate the component. Sensors like computer vision systems may also help robots combat uncertainty. Such systems constantly analyze the position of the robot and recalibrate its other control systems based on the data. Advanced control systems will be necessary for robots working in certain fields, such as medicine and transportation, where an error could result in loss of human lives.
History
For thousands of years, people imagined creating beings to ease the drudgery of work. By the 1500’s, European artisans created clockwork automata (singular, automaton). These figures, often shaped like people, contained clockwork that drove lifelike movements. Automata could be designed to write, draw, drink, and play musical instruments. Because inventors were severely limited in the use of power and programmability, these automata served mostly as entertaining curiosities.
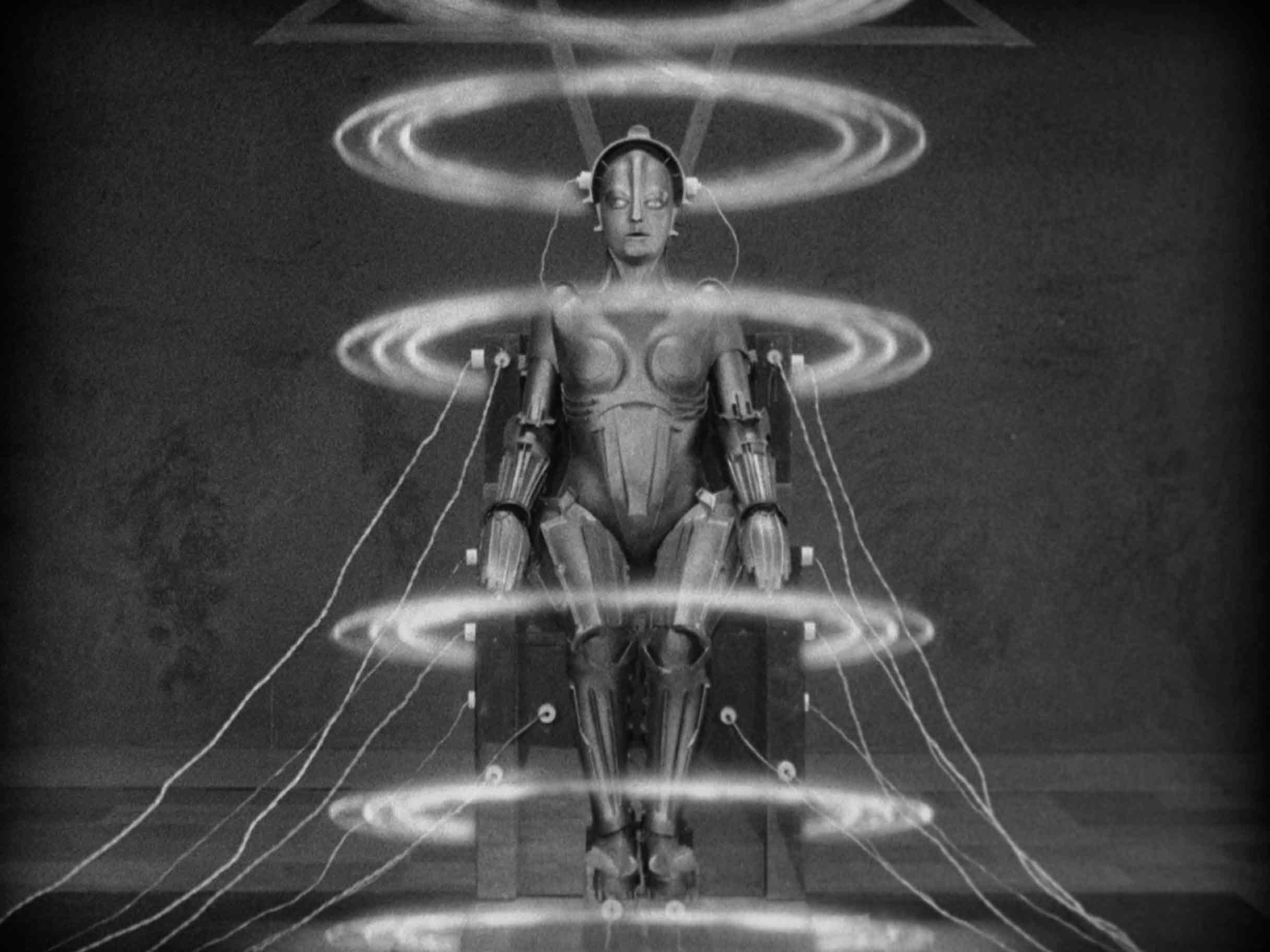
The word robot first entered the world of science fiction in the play R.U.R. (1921), written by the Czech playwright Karel Čapek. In 1927, Westinghouse Electric Corporation introduced Televox, a simple robot that could answer a telephone. That same year, the German film Metropolis became the first major motion picture to feature a humanlike robot. In 1961, the first industrial robot, Unimate (invented in 1954 by George Devol), was incorporated into the assembly line of a General Motors plant in New Jersey. Other factory managers quickly saw the value of such robots’ skills in performing precise and repeatable movements. Robots quickly made their way into many kinds of factories. Today, more robots still operate in factories than in any other environment.
In 1967, roboticists at Stanford University in California built Shakey, a robot capable of simple autonomous decisions. Shakey could be given general instructions to perform a task, such as picking up an object and moving it, and to determine the best way to accomplish that task.
Historically, jobs that were dirty, dull, or dangerous were considered good jobs for robots. By the 2000’s, however, robots began moving out of factories and research laboratories and into other areas of society.
Future of robotics.
Robotics offers immense opportunities to transform society in unexpected ways. Many roboticists believe an explosive expansion of robotics technology is imminent. They predict that robotics technology will become seamlessly embedded into people’s homes, workplaces, and multiple aspects of everyday life in the near future.
Machine learning will play an important role in the future of robotics. Such learning, where the robot can learn something from humans or its environment, can be used to develop new forms of control and new types of behaviors, and to allow the robot to adapt over time to improve its performance or to respond to changes in the world around it. Learning offers the possibility of robots being taught by, rather than programmed by, human instructors.
Human-robot interaction.
As robots are increasingly used in less structured environments, they will increasingly interact with humans. Traditional robotics design considerations must be revised when the robot is to work in close proximity with people. The unpredictability of human behavior and the potential danger a robot might pose to people remain significant challenges in robotics. For example, robots and people may have to collaborate to accomplish a task together. In addition to being able to avoid its human coworkers to prevent injury, the robot may have to understand societal rules and social cues to successfully work with humans.
Ethical concerns
about human-robot interactions will grow as robotics technology becomes more advanced. For instance, roboticists, philosophers, and politicians are debating whether autonomous robots should be used in war. Robots are already used by the military for supply convoys and reconnaissance. Many people worry about robots taking their jobs, while others argue that making changes in workplaces and industries has always created new jobs in parallel. They point to the industrial and computer revolutions as examples. Other ethical concerns relate to legal responsibility when something goes wrong with an autonomous robot. For example, if a robotic car is involved in a crash, it may be difficult to determine who is responsible. Responsible parties may include the software programmer, the car manufacturer, or the car owner. Roboticists and others must determine such standards for robots.
